KG melding with LLMs
Starting
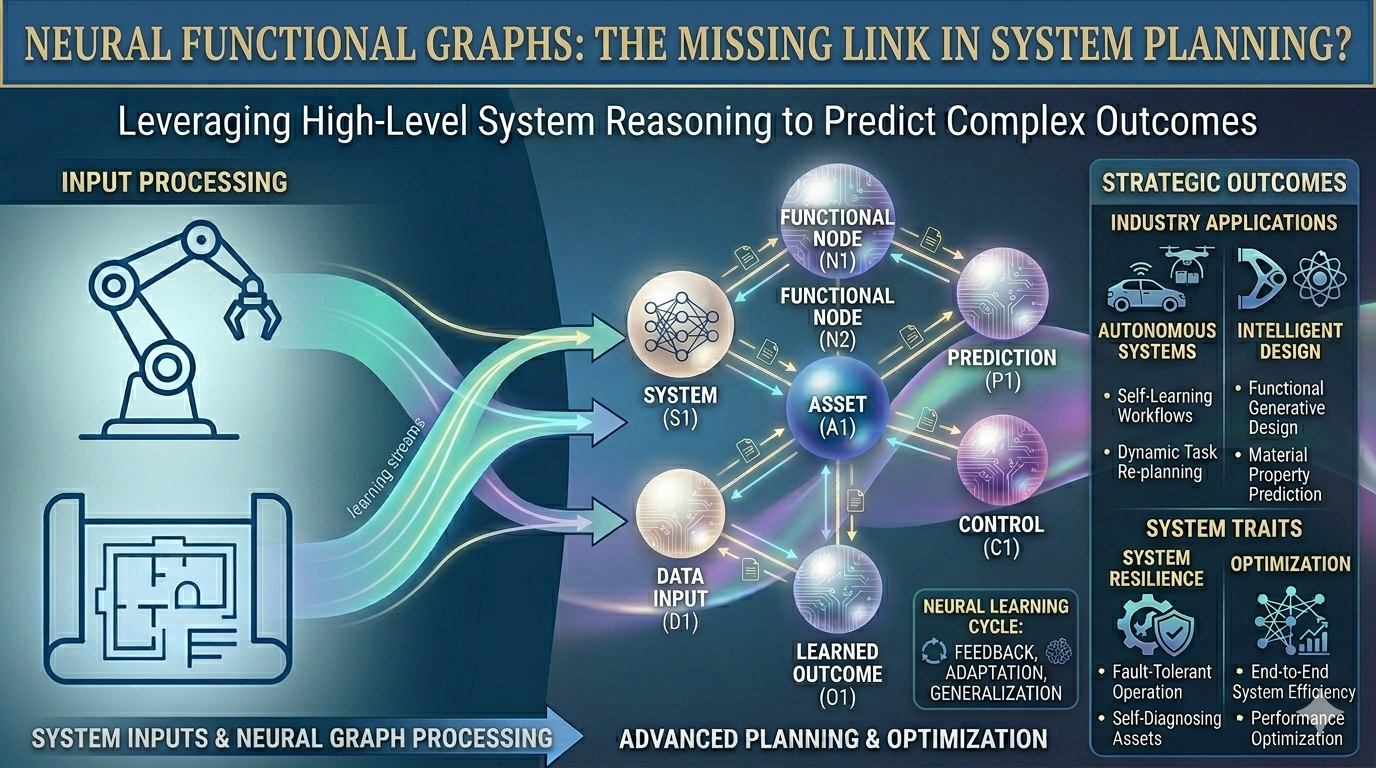
The project develops a graph-based representation of the physical world, mapping real objects to nodes with relevant functional attributes. This enables precise task planning and graph-based reasoning about object relationships, supporting exact predictions beyond the capabilities of conventional LLMs. Knowledge graphs are well suited for modeling and querying complex relationships, and this approach extends them by encoding functional properties in node and edge attributes. The method is illustrated in two key domains: robotics, where graphs are already central to task planning, and engineering design, which has recently gained attention through LLMs and generative AI. Despite this potential, challenges remain in how systems are described and represented.

